Robot Learning Project
Robot Learning project is focused on training a robot with VR or MR approaches.
Zhenliang Zhang
Research Scientist of AI
My research interests include wearable computing, machine learning, Cognitive Reasoning, and mixed/virtual reality.
![[ICLR 2024] Bongard-OpenWorld: Few-Shot Reasoning for Free-form Visual Concepts in the Real World](/publication/conf_iclr24_bongardow/featured_hu691f13b767efc7075ac4dbb20cbf2a7b_217853_31e65263a9b94119755ed880e5e440d1.webp)
![[Engineering 2023] The tong test: Evaluating artificial general intelligence through dynamic embodied physical and social interactions](/publication/journal_engineering_tongtest/featured_hu9dadddc4766677badb59d1e9a3976b01_120795_d64e92635c4fd02dbed031474b10e597.webp)
![[Engineering 2023] A reconfigurable data glove for reconstructing physical and virtual grasps](/publication/journal_engineering_grasp/featured_hu77153321ae4daccaac199ad6fbfd6536_206746_d30ee2f762f83c1007978fbc148c9374.webp)
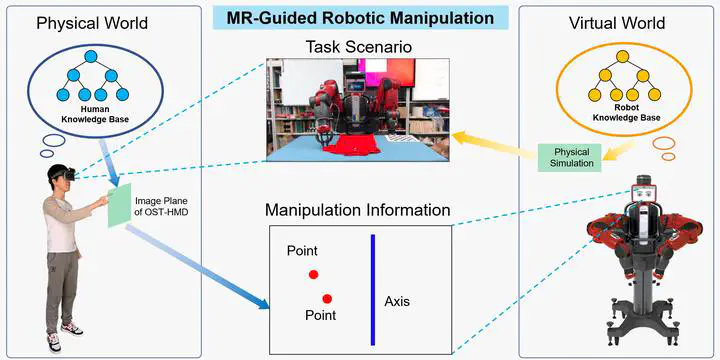
![[IROS 2020] Graph-based hierarchical knowledge representation for robot task transfer from virtual to physical world](/publication/conf_iros20_graph_based_robot_learning/featured_huaa3d90b38b6a7f2dca11879ff16b340f_1300600_1d146d071b035287d88b9321cc14e66b.webp)
![[VR 2020] Extracting and transferring hierarchical knowledge to robots using virtual reality](/publication/conf_vr20_extract_knowledge_robot/featured_hufb0ea0dd49b07a101bfcf9af622affed_175830_0ffc1289cb6da6dc6f9c3aaea295219e.webp)
![[ICRA 2019] High-fidelity grasping in virtual reality using a glove-based system](/publication/conf_icra19_vr_glove/featured_hub369d45bd5dcba5076fed85a9f52220c_10099147_150x0_resize_lanczos_1.gif)
![[TURC 2019] VRGym: A virtual testbed for physical and interactive AI](/publication/conf_turc19_vrgym/featured_hu21e71e3f34973803f76b58ab16753885_655677_96a186041910c9fcee145f5a04f83a81.webp)