[ISMAR 2020] Machine intelligence matters: Rethink human-robot collaboration based on symmetrical reality
Abstract
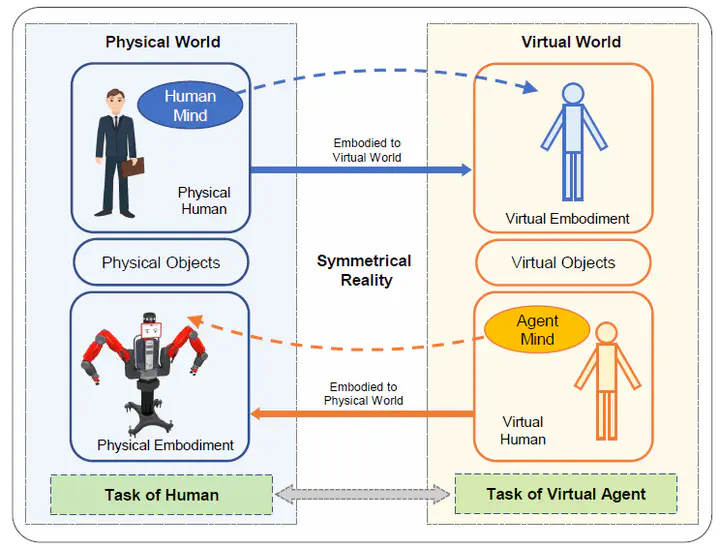
Human-robot collaboration could be valuable in some challenging tasks. Previous researches only consider the human-centered systems, but there will be many changes in the symmetrical reality (SR) systems because there are two perceptual centers in symmetrical reality. In this paper, we introduce the contents of the symmetrical reality-based human-robot collaboration and interpret the humanrobot collaboration from the perspective of equivalent interaction. By analyzing task definition in symmetrical reality, we present the special features of human-robot collaboration. Furthermore, there are many fields in which the symmetrical reality can produce a remarkable effect, we only list some typical applications, such as service robots, remote training, interactive exhibition, digital assistants, companion robots, the immersive entertainment community and so forth. The current situation and future development of this framework are also analyzed to provide a kind of guidance for researchers.
Zhenliang Zhang
Research Scientist of AI
My research interests include wearable computing, machine learning, Cognitive Reasoning, and mixed/virtual reality.