[RAL 2026] Active Kinematic Modeling for Precise Manipulation of Unseen Articulated Objects
Abstract
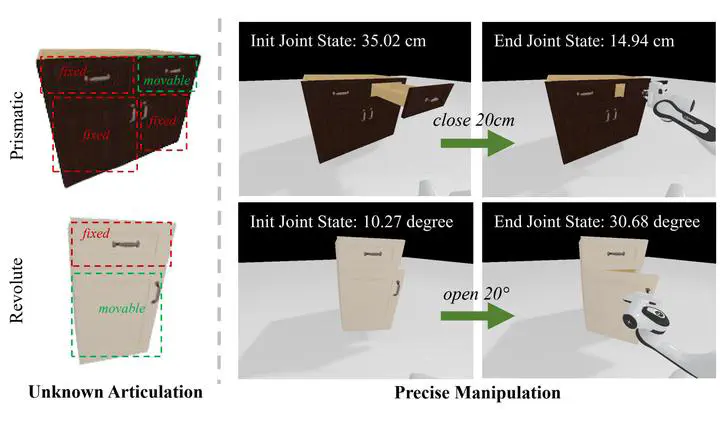
Precisely manipulating an unseen articulated object is a common yet challenging task, primarily due to the ambiguity in predicting the affordance and the articulation model of the object. Current data-driven methods learn spurious correlations through passive observation, which limits their adaptability to new objects and precision in manipulation tasks. To achieve robust generalization and precise manipulation, we propose a novel Active Kinematic Modeling method (AKM), where robots actively interact with objects to overcome spurious correlations and achieve precise kinematic modeling. Our method is composed of three stages. First, hypothesis-driven exploration identifies contact points where interactions with the object trigger detectable relative motion between its parts. Next, unsupervised articulation modeling analyzes the recorded motion frames to construct an articulation model of the object. Finally, the model enables closed-loop manipulation via on-the-fly relocalization and replanning for precise execution. We validate AKM in simulation across a diverse benchmark of 116 articulated objects and demonstrate its generalization ability by deploying it to a real-world robotic system, consistently achieving sub-centimeter manipulation accuracy.
Zhenliang Zhang
Research Scientist of AI
My research interests include wearable computing, machine learning, Cognitive Reasoning, and mixed/virtual reality.